














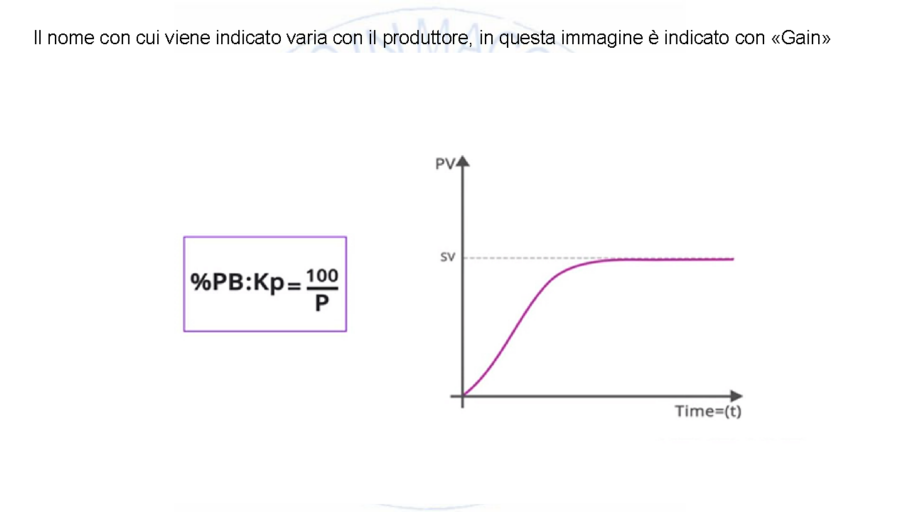
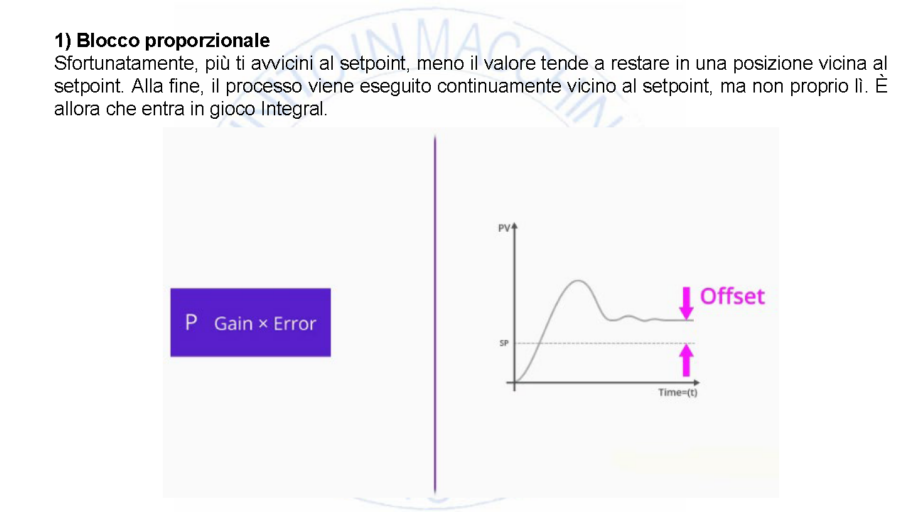
Sfortunatamente non esiste uno standard di settore sui termini dei parametri. Ecco alcuni degli usi trovati oggi. Il termine «Proporzionale», spesso chiamato «P» costante, può essere indicato come «Guadagno proporzionale» o semplicemente «Guadagno» che non è un’unità ma un «Rapporto». Questo parametro può essere chiamato anche «Banda proporzionale» e misurato nell’unità percentuale. Il parametro può essere chiamato KP, Gain o altri. Questo è il parametro che determina la velocità di risposta del sistema.




In sostanza, indipendentemente dal tipo di misurazione, l’Integrale è la somma di tutti i valori riportati dal segnale catturati da quando hai iniziato a contare fino a quando hai completato il conteggio o l’area sotto una curva tracciata. Questo parametro può essere chiamato «Ki» per «Ripetizioni al Secondo» e «Ripetizioni al Minuto», «Ti» per «Secondi per Ripetizione» e «Minuti per Ripetizione» o altri. Ricordare che Ki = 1/𝑇𝑖


A causa delle diverse misurazioni, questo parametro potrebbe non essere così facile da regolare. In breve, valori «più piccoli» nelle misurazioni «Minuti per Ripetizione» creeranno un’azione integrale «più grande», mentre valori «più grandi» nelle misurazioni «Ripetizioni per Minuto» creeranno lo stesso un’azione integrale «più grande».






Il primo passo per mettere a punto il controllore è determinare la quantità di regolazione che è possibile apportare senza gravi implicazioni per il processo.





Un approccio più misurato consiste nell’iniziare con un «Guadagno» basso, con «Integrale» e «Derivata» disabilitati. Guarda il processo e inizia a regolare gradualmente il «Guadagno» raddoppiando il valore.





La valvola riempie il serbatoio mentre la pompa lo scarica. Se la valvola viene azionata con controllo ON/OFF, l'acqua oscillerà intorno al setpoint del 50%.
Per il nostro scopo, diciamo che la fluttuazione è ±10%. Nella maggior parte delle applicazioni industriali, questa fluttuazione intorno al setpoint non è accettabile.
OK, bene, e se fosse possibile strozzare la valvola e posizionarla in qualsiasi posizione tra ON e OFF ?

















Nessun commento:
Posta un commento
Per qualsiasi errore o rettifica vogliate lasciare un commento